|
【控制要求】
在触摸屏上监控,运动轴在运行过程中,按下暂停键时,运动轴暂停,
暂停键断开后要求运动轴能在暂停位置继续运行到初始设定的位移处。 【动作分析】
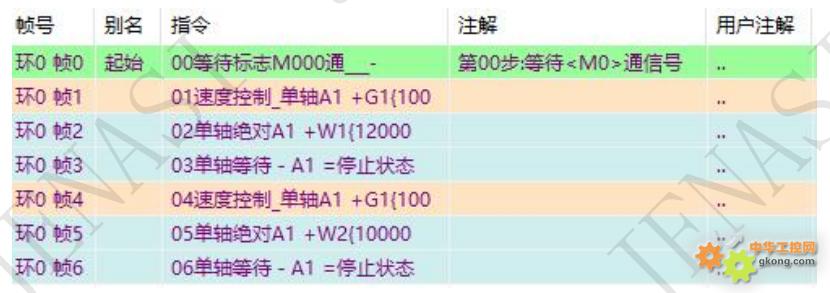
按下启动按键时,电机开始正转绝对运行 12000 个位移值(用寄存
器模式,W1 寄存器表示位移值,也就是 W1=12000),等电机停止后,
再反转绝对运行 10000 个位移值(用寄存器模式,W2 寄存器表示位移
值,也就是 W1=10000),等待电机停止。
添加暂停按键,按下暂停按键时,运动轴减速停止,再断开暂停信号
时,运动轴继续运行将余下没有运行完的位移值运行完。
关于运动轴继续往下运行的操作,我们可以用一个 W32 位寄存器专
门来记录轴运动的脉冲总数(记录位置用到寄存器均是 W32 位寄存器),
比如用 W0 寄存器来记录运动的脉冲数,也就是指令运行到了哪一个单
轴操作指令帧时,W0 记录的就是当前帧的总脉冲数,如程序运行到“电
机正转 12000 个脉冲”的指令帧时,W0 记录的位置就是 12000,若程
序运行到“电机反转 10000 个脉冲”的指令帧时,W0 记录的位置就是
10000,再恢复轴运动时,只需要添加单轴绝对指令运行到 W0 记录的
位置就可以了。
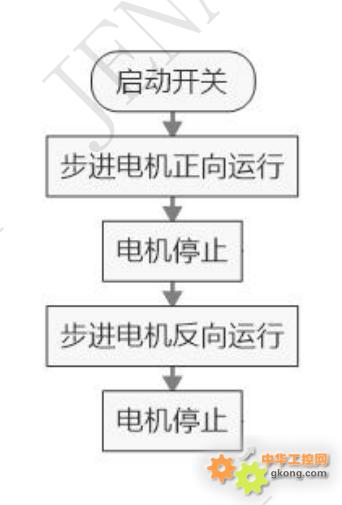
【控制流程图】
根据要求画出主动作流程图。
【程序编辑】
①在编辑程序之前,先在轴参数处设置“开启记录位置”,在属性框
处选择需要用的记录位置寄存器:W0。
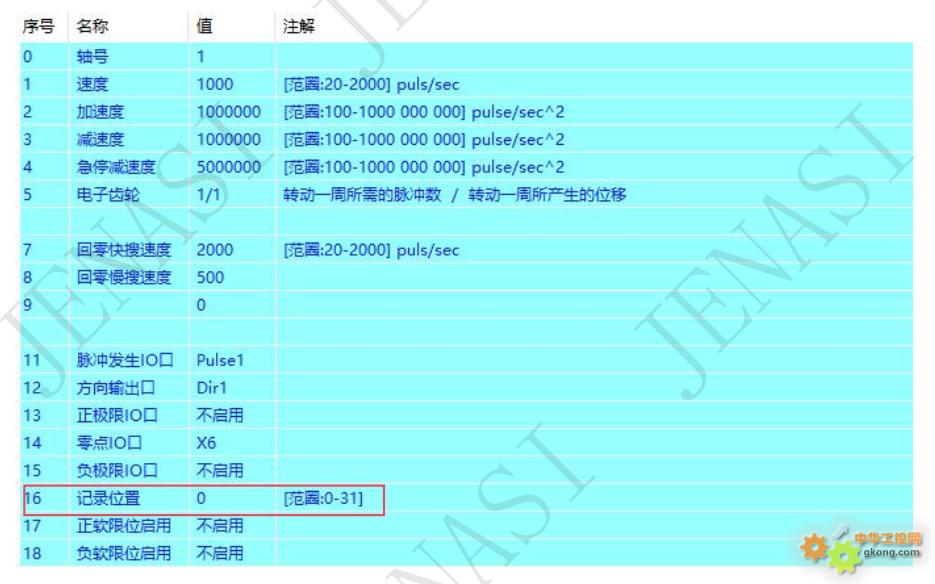
属性框选择:在启用记录位置处,选择“是”,记录预算位置就是寄
存器的序号,如“0”就是 W0 寄存器。

②在时序 0 环编辑轴运动程序。添加等待辅助 M0 通,作为启动按
键(触摸界面)。
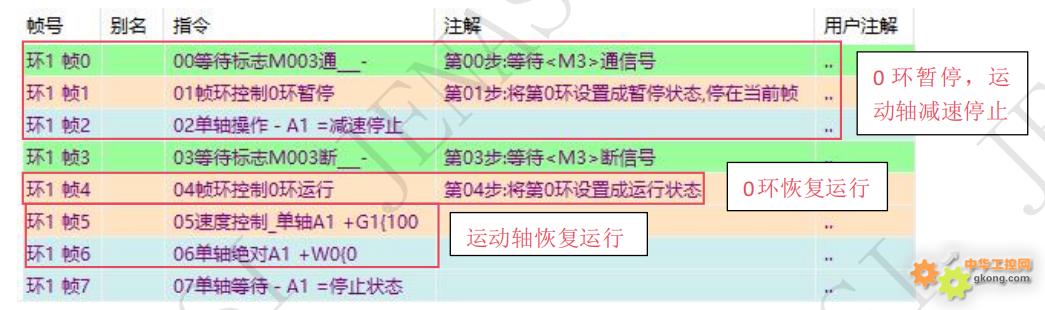
③在时序 1 环编辑运动轴暂停程序,添加等待辅助 M3 通,作为暂
停按键,M3 有信号时,控制 0 环程序停止,运动轴减速停止,程序暂
停;等待暂停信号 M3 断开时,添加单轴运动,运动到 W0 寄存器记录
的绝对位移处(这里的 W0 寄存器值可以不用设置,开启记录位置后,系统会自动记录)。
|

