|
【控制要求】
在人机界面(显示屏)实现对运动轴的启动停止和手动正转、手动反
转以及机械回零操作。 【控制流程图】
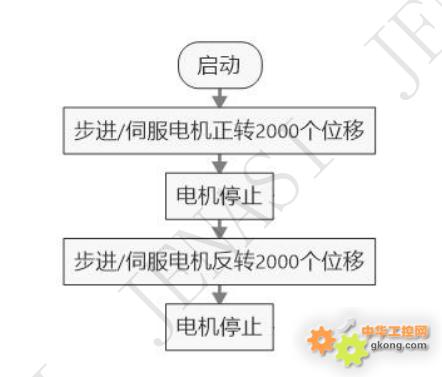
1、运动轴启动程序流程图:
2、运动轴回零程序流程图:

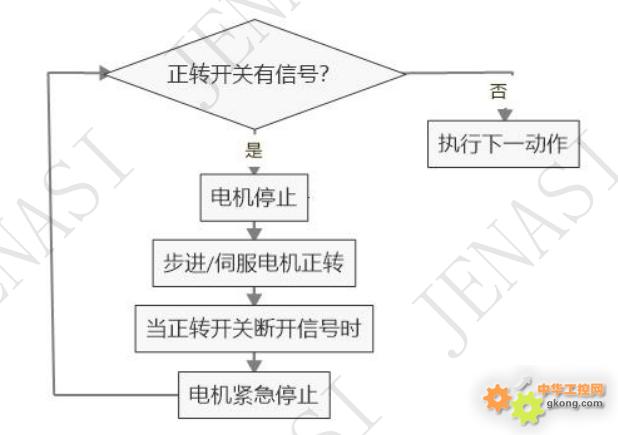
3、运动轴手动正反转程序流程图:
正转:
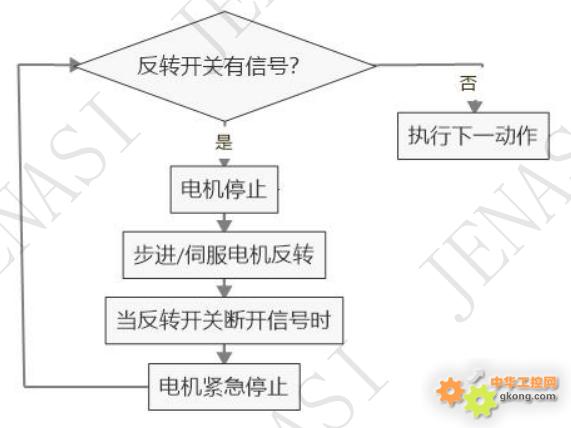
反转:
4、运动轴急停设置:添加急停按键,控制所有的动作断开,复位。
5、运动轴脉冲清零设置:添加清零按键,对脉冲位置清零。
【组件说明】
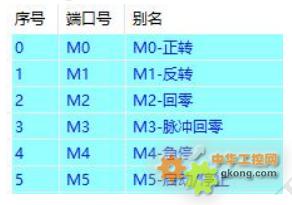
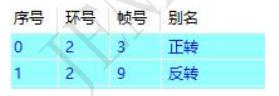
1、辅助标志别名:在界面上实现按键,需要用到 PLC 中的辅助标志:
M。(不能直接添加输入 X 端,因为 X 端为外部信号,不能在界面上操
作,只能在界面上监控。)
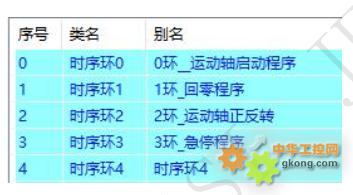
2、时序环帧别名:对时序环中的指令帧进行别名,选用的时候,可
以选择别名模式,这样能更精准的找到所需的指令帧。此处别名可编辑
完程序之后,对应指令所在的帧进行别名。
3、类视图别名:对时序环名称进行别名,更容易区别于每个时序环编辑的是哪一段程序。
【PLC 程序编辑】
在时序环编辑程序,每个环都能编辑独立的程序。
1、在时序环 0 编辑运动轴的启动程序:
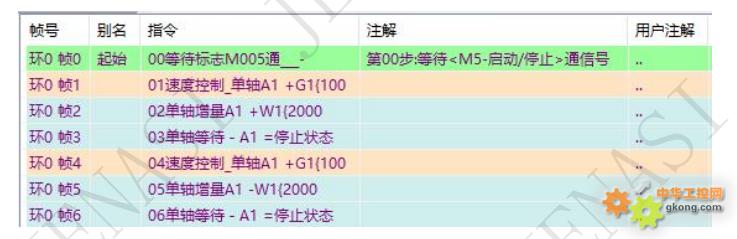
添加“等待标志 M5”表示启动/停止按键,再添加“单轴运动”指令,轴
1 以“增量”的方式正向运行 2000 个位移,需要等轴运行完成之后再进行
反转,必须添加“单轴等待”表示电机正转完成,停止;接着添加“单轴运
动”指令,轴 1 以“增量”的方式反向运行 2000 个位移,再“单轴等待”表
示电机反转完成,停止。
2、在时序环 1 编辑运动轴的回零程序:

添加“等待标志 M2”表示回零按键,再添加“单轴操作”指令,选择回
零方向:正向(正向和负向:均会回零,遇到极限会返回重新回零),
最后添加“单轴等待”表示电机回零完成,停止。
3、在时序环 2 编辑运动轴的手动正反转程序:
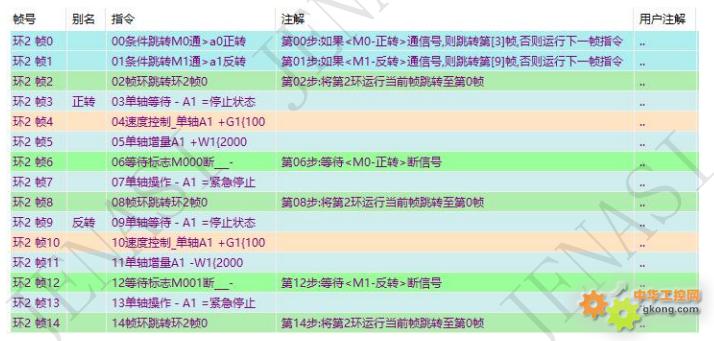
手动正反转可以在同一个时序环,通过条件选择的指令来进行正反转
的动作:
添加程序选择指令:正转和反转。
①第 0 帧,添加第 1 条指令:“条件跳转 M0(通):若 M0 有信号
时,根据别名“正转”跳转至 2 环帧 3,若 M0 无信号时,则执行下一帧
指令”;
②第 1 帧,添加第 2 条指令:“条件跳转 M1(通):若 M1 有信号
时,根据别名“反转”跳转至 2 环帧 8,若 M1 无信号时,则执行下一帧
指令”;
③第 2 帧,添加第 3 条指令:“帧环跳转:运行至当前指令,将动作
跳转至 0 帧,此处为绝对跳转,只要前面的条件不满足往下执行到该指
令,就会继续跳回 0 帧检测信号”。
添加正转程序。
④第 3 帧,开始添加正转动作程序,先检测运动轴为停止状态,添加
“单轴等待:停止状态”。
⑤第 4 帧,再添加“单轴运动:增量方式,正向运行,位移值可设置
成 2000”。
⑥第 5 帧,添加“等待标志:M0 断”,也就是检测到正转信号 M0 断
开时,此时电机要停止,再往下添加指令。
⑦第 6 帧,添加“单轴操作:紧急停止”,运行到该指令时,电机紧急
停止。
⑧第 7 帧,添加指令:“帧环跳转:运行至当前指令,将动作跳转至
0 帧,此处为绝对跳转,只要前面的条件不满足往下执行到该指令,就
会继续跳回 0 帧检测信号”。
添加反转程序。
⑨第 8 帧,开始添加反转动作程序,先检测运动轴为停止状态,添加
“单轴等待:停止状态”。
⑩第 9 帧,再添加“单轴运动:增量方式,反向运行,位移值可设置
成 2000”。
?第 10 帧,添加“等待标志:M1 断”,也就是检测到正转信号 M1
断开时,此时电机要停止,再往下添加指令。
?第 11 帧,添加“单轴操作:紧急停止”,运行到该指令时,电机紧
急停止。
?第 12 帧,添加指令:“帧环跳转:运行至当前指令,将动作跳转至
0 帧,此处为绝对跳转,只要前面的条件不满足往下执行到该指令,就
会继续跳回 0 帧检测信号”。
4、在时序环 3 编辑运动轴的急停程序:
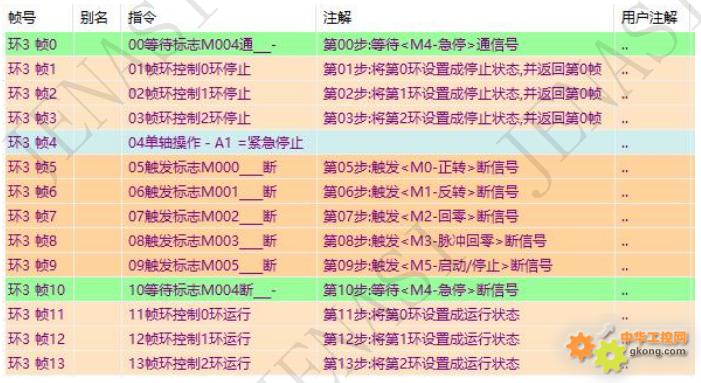
①第 0 帧,添加第 1 类指令:“等待标志 M4(通):若 M4 有信号
时,就开始执行急停程序,起到复位的作用。
②第 1-3 帧,添加第 2 类指令:“帧环控制:停止。设置了几个时序
环就添加几条帧环控制指令,将除去急停环的其他所有环,控制为停止
状态,如 0 环、1 环和 2 环为停止状态并返回 0 帧。
③第 4-9 帧,添加第 3 类指令:“触发指令:触发所有的输出、标志
断开,运动轴用“单轴操作指令:紧急停止”,停止运行。
⑤第 10 帧,添加第 4 类指令:触发标志 M4(断):若 M4 无信号
信号了,急停程序结束,每个环都是复位的状态。
⑥第 11-13 帧,添加第 5 类指令:“帧环控制:运行。设置了几个时
序环就添加几条帧环控制指令,将除去急停环的其他所有环,控制为运
行状态,如 0 环、1 环和 2 环为运行状态。
5、在组合逻辑编辑运动轴的脉冲清零程序:

添加“等待标志 M3 通”(组长),再“触发标志 M3 断”(组员),再
添加清零计算:赋值运算:P[1]=D[0]+D[0]。其中 D 表示数值寄存器,
ID 就是数值寄存器的值,如 D[0]=0,D[1]=1,D[2]=2......
|

